PID controller values tuning
This python script example helps to understand how to set up two loops respectively dedicated to Kp and Ki values in order to tune the PID controller.
In deed, a nested loop is used by sweeping Kp and Ki values for having a quick idea of the impact of PID controller values to the output voltage.
It can be useful when we want to optimize the circuit into a semi automated way to extract the best couple of Kp, Ki values depending on constraints and specifications set.
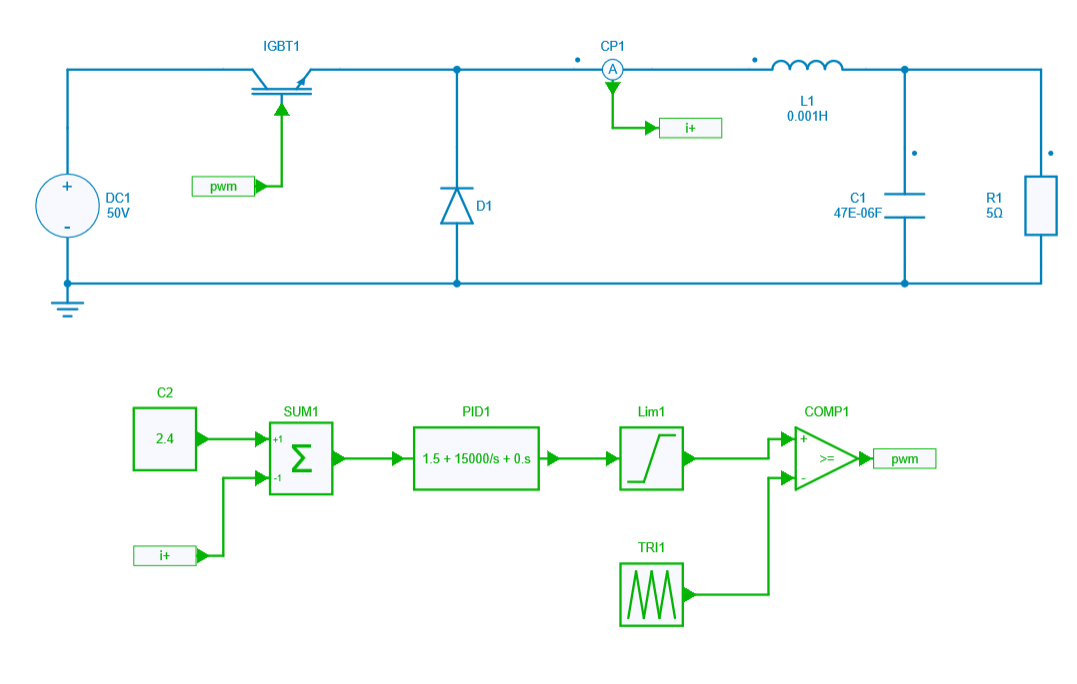
The power converter topology used for this example is a simple Buck with Average Current Mode Control.
SIMBA circuit
Below the DC-DC power converter designed inside SIMBA Desktop.
Python Script
The Python script used for showing semi automated PID controller tuning will do the following tasks:
- define 2 variables Kp and Ki within minimum and maximum limit values
- create a loop dedicated to Kp parameter which varies between minimum and maximum values defined
- create a second loop dedicated to Ki parameter (inside the first Kp loop) which also varies between minimum and maximum limit values defined
- retrieve the ouput voltage which is equal to the voltage accross R1 for each couple of values Kp, Ki swept
- plot the output voltage by using matplotlib module for each different cases
Conclusion
Below the result of the output voltage once the simulation is over through the Python script
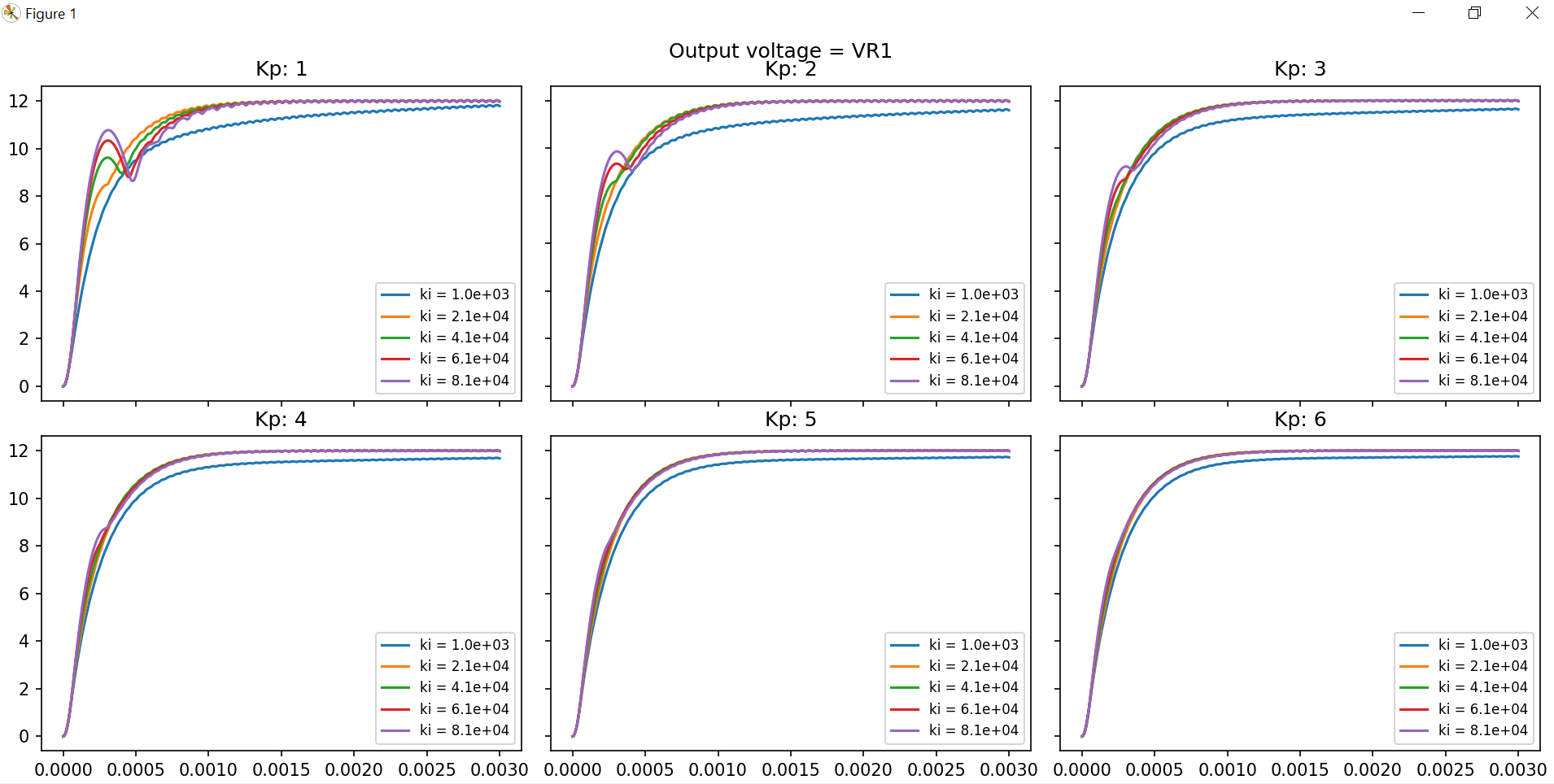
As we can see, there is a big impact of Kp and Ki values for the output voltage.
Indeed, the overshoot, ripple and rise time are strongly dependent of such values.