DC Power Flow Control
Download python notebook and its figure 1 and figure 2
This example shows a combined use of python control toolbox and Simba to design and check a DC power flow control between two switching legs.
In a first step, the current control of a single leg is considered: continuous and discrete controllers are designed and then checked with Simba simulations. Secondly, the controller is used to control the power flow between the two switching legs.
Step 1: Controller design of single leg
Design of a continuous controller
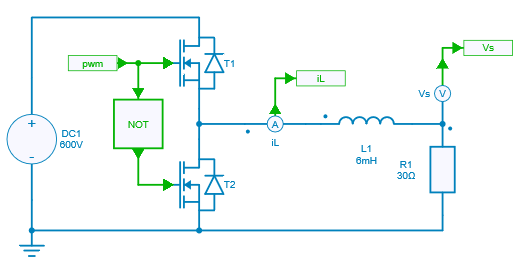
The controller is considered with a compensation of the output voltage as shown below:

The closed loop transfer function can then be computed:
Considering the denominator of this transfer function can be written as:
This leads to:
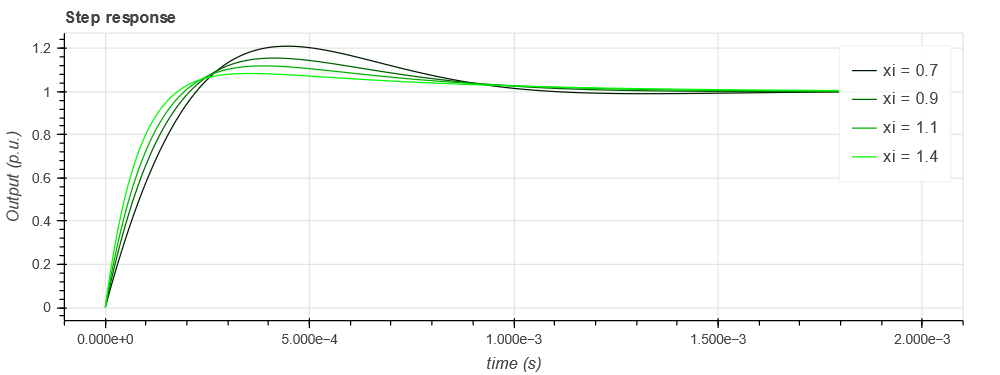
K_p and K_i are computed for different values of damping \xi. The steps reponses are plotted thanks to the python control toolbox.
# Step responses with xi parameter sweep
for xi in [0.7, 0.9, 1.1, 1.4]:
Ki = wn ** 2 * L / E
Kp = 2 * xi * Ki / wn
tf = control.tf(np.array([Kp / Ki, 1]), np.array([1 / wn**2, 2 * xi / wn, 1]))
(simutime, output) = control.step_response(tf, simutime, X0=0)
step_response_sweep.line(simutime, output, color=(0, green_color, 0), legend_label='xi = ' + str(xi))
green_color += 75
show(step_response_sweep)
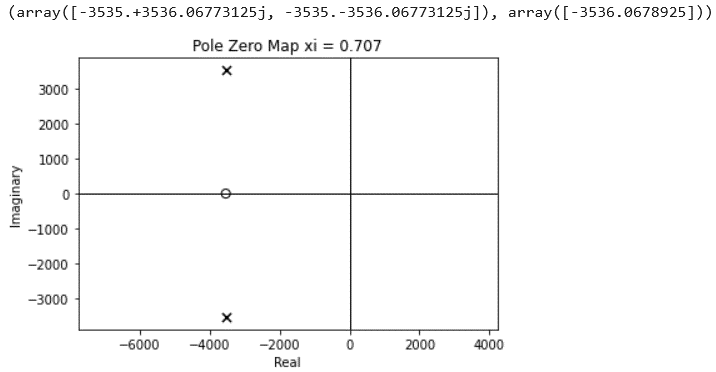
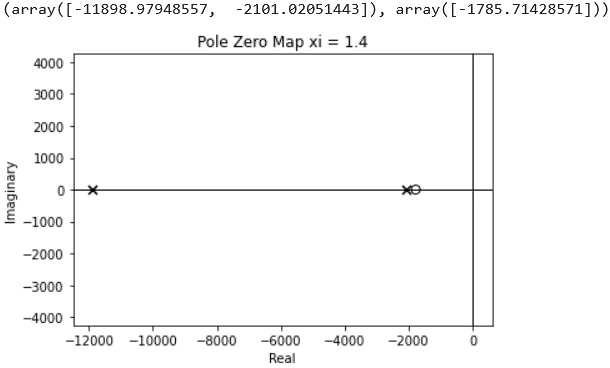
The pole-zero maps can also be plotted to evalute the evolution of the imaginary part of the poles with the following command:
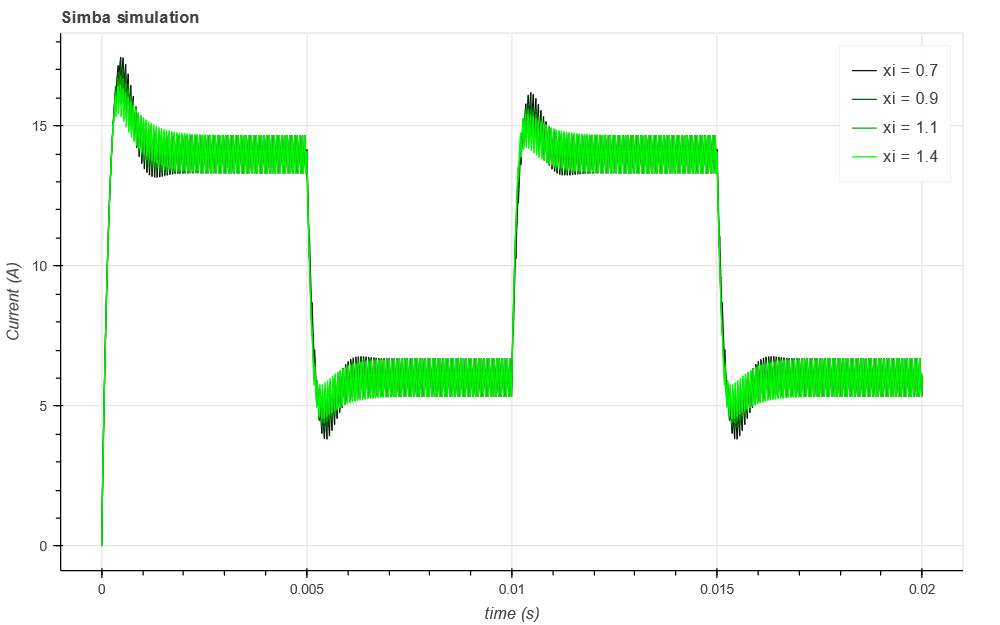
The behavior of the switching leg with this continuous controller is checked with real waveforms thanks to Simba simulations:
# Simba simulations and plot with xi parameter sweep
for xi in [0.7, 0.9, 1.1, 1.4]:
Ki = wn ** 2 * L / E
Kp = 2 * xi * Ki / wn
PI.Kp = Kp
PI.Ki = Ki
sweep_job = direct_current_continuous_controller.TransientAnalysis.NewJob()
status = sweep_job.Run()
simba_time_continuous = sweep_job.TimePoints
iL_continuous = sweep_job.GetSignalByName('L1 - Instantaneous Current').DataPoints
simba_sweep.line(simba_time_continuous, iL_continuous, color=(0, green_color, 0), legend_label='xi = ' + str(xi))
green_color += 75
show(simba_sweep)
Design of a discrete controller
The continuous to discrete transformation using Tustin method gives: s = \dfrac{2}{T_s} \dfrac{z-1}{z+1},
which leads to: C(z) = \dfrac{1}{1-z^{-1}} \left(K_p + \frac{1}{2} K_i T_s + (- K_p + \frac{1}{2} K_i T_s) ~ z^{-1}\right)
and then to the recurrence equation: \alpha(k) = \alpha(k-1) + a_1 \varepsilon(k) + a_0 \varepsilon(k-1)
with: a_0 = -K_p + \frac{1}{2} K_i T_s and a_1 = K_p + \frac{1}{2} K_i T_s
This values are loaded in the Simba simulation file.
direct_current_discrete_controller = project.GetDesignByName('direct_current_discrete_controller')
a0_element = direct_current_discrete_controller.Circuit.GetDeviceByName('a0')
a1_element = direct_current_discrete_controller.Circuit.GetDeviceByName('a1')
a0_element.Value = a0
a1_element.Value = a1
discrete_job = direct_current_discrete_controller.TransientAnalysis.NewJob()
status = discrete_job.Run()
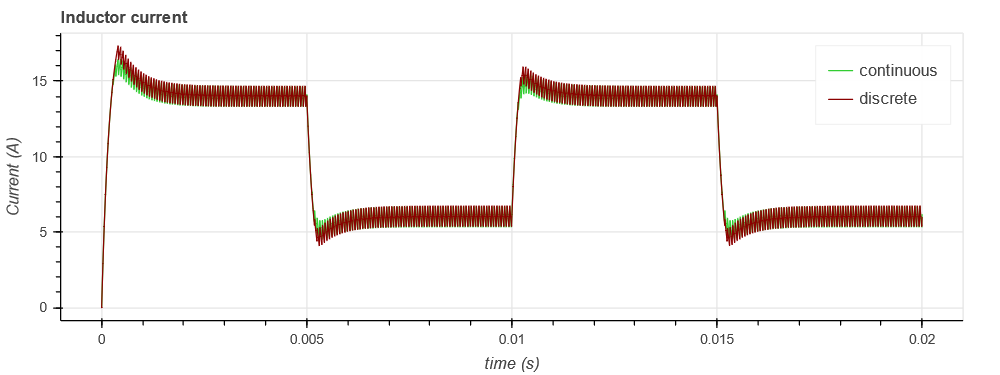
The results got with this discrete controller can be compared with the continuous controller:
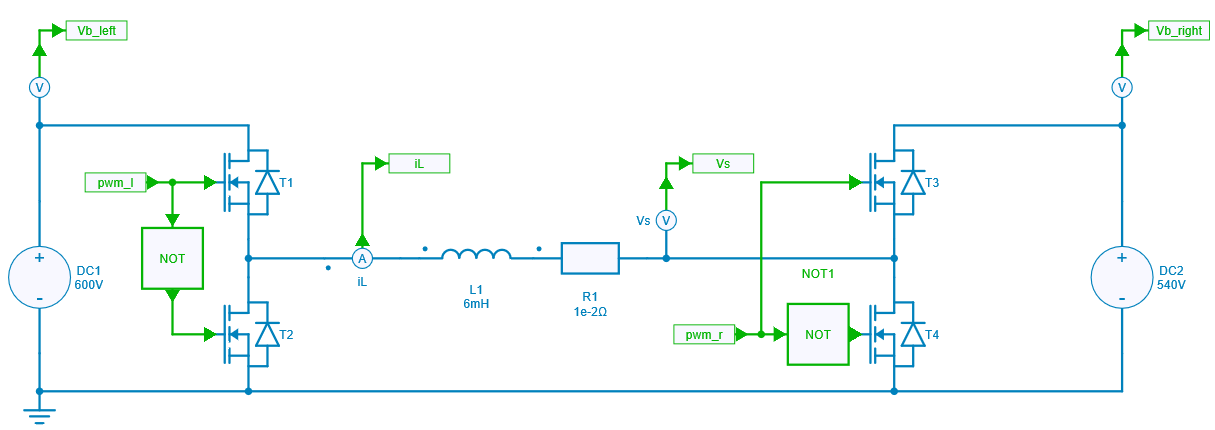
Step 2: DC Power flow control
This discrete controller is then used to control the power flow between two switching legs via the current reference. Indeed, the current reference is first directly derived from the power reference transferred from the left leg to the right leg. Then, the controller computes the delta duty cycle which must be applied between the two legs.
Figure below shows this control model which provides the duty cycles for each leg.
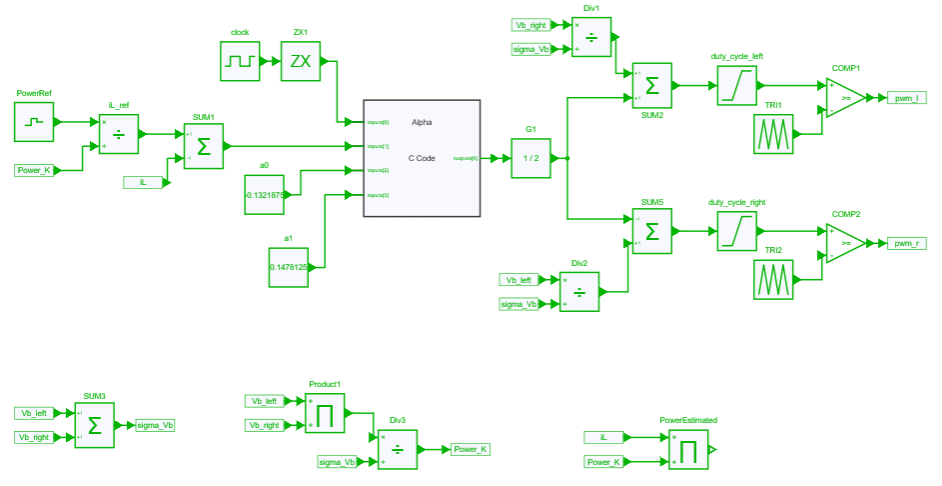
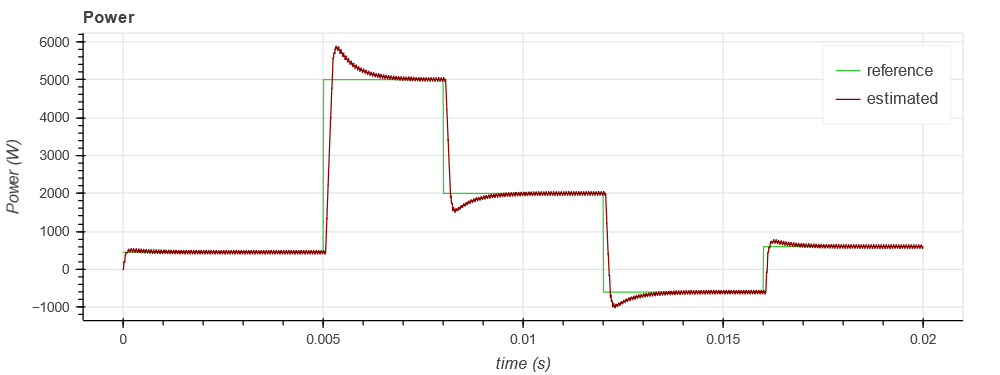
Figure below shows some results with the power reference and the estimated transferred power.
Acknowledgments
This example has been built from a work by A. Berasain et al. "Power control between two DC buses for on-board systems network stability support" in Proc. of Industrial Electronics, 2009 and from a lab session prepared at N7 by G. Gateau, J. Regnier.